DFRobot’s Non-contact Liquid Level Sensor XKC-Y25-T12V SKU: SEN0204 is a sensor that detects the condition whether there is air or water in an invisible tank or pipe Returning binary signal selection. Let’s code to detect the signal using the RaspberryPI GPIO port (Genreral purpose Input Output).
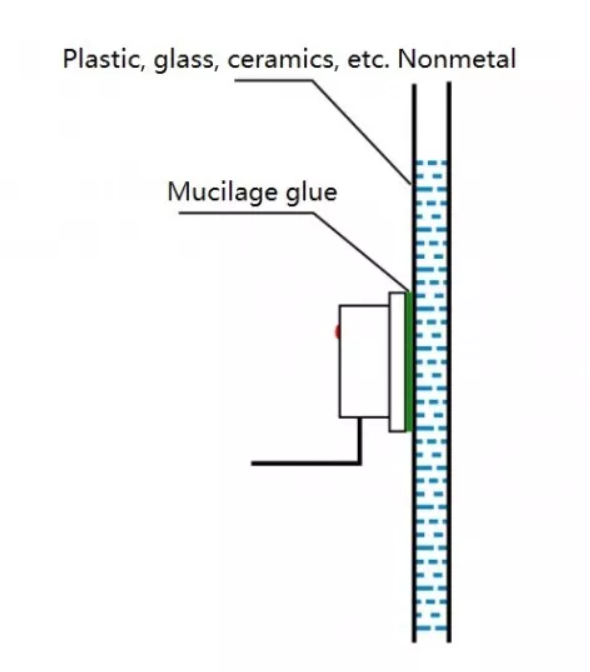
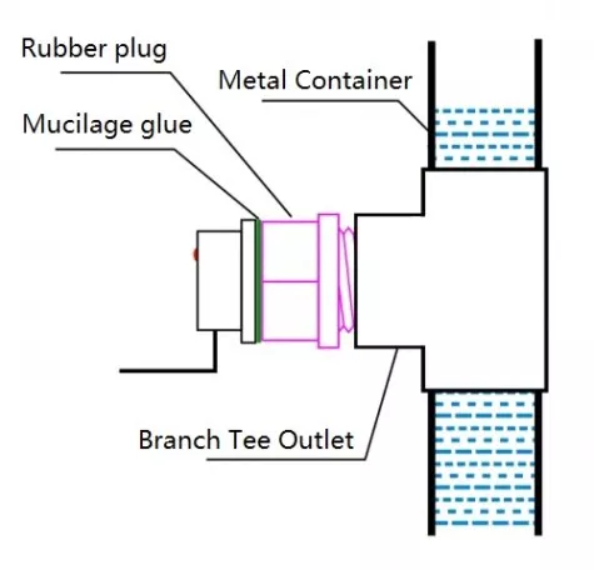
The non-contact liquid level sensor utilizes advanced signal processing technology by using a powerful chip with high-speed operation capacity to achieve non-contact liquid level detection. No contact with liquid makes the module suitable for hazardous applications such as detecting toxic substances, strong acid, strong alkali and all kinds of liquid in an airtight container under high pressure. There are no special requirements for the liquid or container and the sensor is easy to use and easy to install.
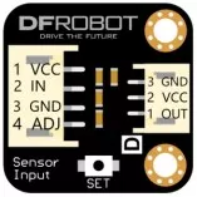
The liquid level sensor is equipped with an interface adapter that makes it compatible with DFRobot “Gravity” interface. There are 4 levels of sensitivity which are set by pressing the SET button.
4Pins into 3 Pins : ( 4 Pins are converted into 3 with small control board)
VCC (5~24v)
GND
Signal (Digital get)
Pin Description
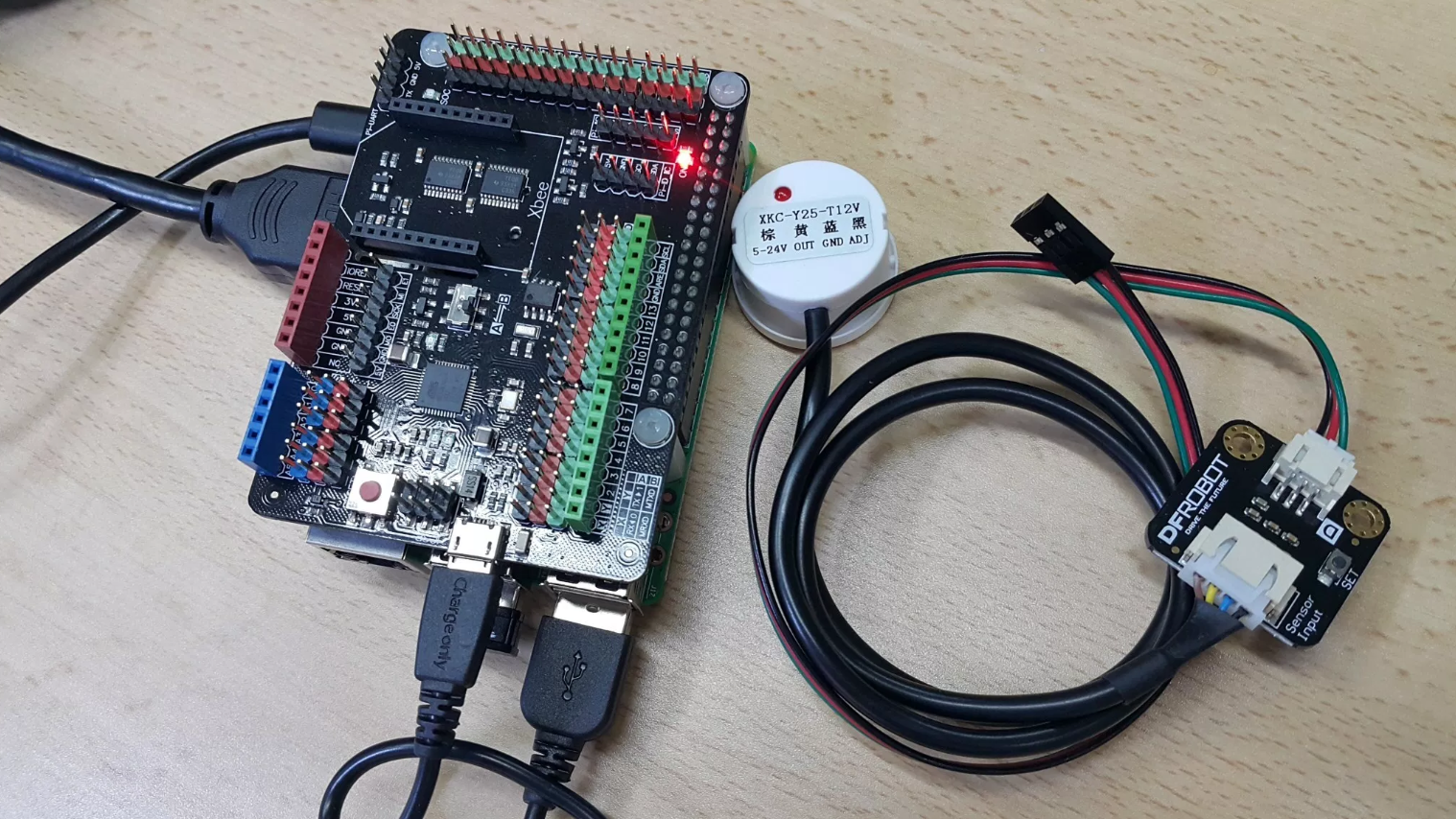
Liquid Level Sensor-XKC-Y25-T12V Pin defination
fig.03 - adaptor & sensor in detail
Num.
Name
Description
1
(Brown)
VCC
In VCC (range: +5V~+24V)
2
(Yellow)
OUT
Liquid level sensor signal output
3
(Blue)
GND
GND
4
(Black)
ADJ
Sensor sensitivity adjustingswitch (Adjust the sensor
sensitivity, 4 modes in all. Click the SET button
on the adapter to set the sensor sensitivity.)
Non-contact Liquid Level Sensor Adapter
Liquid Level Sensor-XKC-Y25-T12V Pin defination
fig.04 - adaptor circuit
Num.
Name
Description
Left_1
VCC
InVCC (range: +5V~+24V)
Left_2
OUT
Liquid level sensor signal output
Left_3
GND
GND
Left_4
ADJ
Sensor sensitivity adjusting switch (Adjust the sensor
sensitivity, 4 modes in all. Click the SET button on